
Disclaimer: технических подробностей не будет, у нас тут не Хабр, но если будет интересно - готов рассказать в деталях!
Disclaimer2: я в первый раз в жизни пишу пост, понятия не имею, как это делается. Будет много картинок :)
Что за соревнования такие
Существует в России, в Санкт-Петербурге, странноватое место, которое называется ЦНИИ РТК. В 2016 году я пришел туда работать, и оказалось, что они проводят свои соревнования, к тому моменту уже 1 или 2 года как.

Подробно про сами соревнования, регламент и вообще все можно узнать на официальном сайте и группе ВК, поэтому я тут кратенько.
Есть полигон, который состоит из кубиков, каждый кубик - испытание, проходишь испытание - получаешь баллы. Робот разваливается по дороге, требуется вмешательство или еще что-нибудь - теряешь баллы, кто набрал больше баллов - тот и молодец :)
Две попытки по 10 минут, в зачет идет лучшая.

Есть две основные категории:
- Искатель - для тех кто младше, смотришь на робота, едешь по полигону
- Экстремал - для тех то старше, сидишь в будке, робота не видишь, ориентируешься только по тому, что он тебе присылает. (Обычно это скучное видео с камеры, но жесткого правила нет, если будете ехать чисто по дальномерам - я хочу видео)
Задания можно разнести на три категории:
- На проходимость - проехать по крыше, по искусственной траве, по куску линолеума смазанному WD-40, по всяким нагромождениям, все в таком духе
- На использование манипулятора (если он есть конечно) - перекладывать разные штуки с места на место, поворачивать вентили и т.д.
- На автономность - прям в выделенных под это ячейках есть только следование по линии, но потенциально можно проехать автономно хоть весь полигон, и чтоб сам еще манипулятором все пошевелил. Ограничение, на сколько я помню, в том, что нельзя совсем уж тупых штук вроде ехать вперед 10 секунд, повернуть направо, ехать 5 секунд
Что я там делал вообще
С маркетингом первые годы все было плохо и тупо не хватало участников, поэтому было как-то так:
— Ты участвуешь в соревнованиях роботов
— Эээээээ
— Это не вопрос был, робота мы тебе дадим, на первое время
Обычно соревнования проводились в рамках каких-нибудь фестивалей типа Робофиниста или Robofest, поэтому там были и просто посетители, которых надо было развлекать, этим мы и занимались. Ну еще собирали и разбирали полигон, придумывали и делали для него новые препятствия, помогали с проведением самих соревнований.
Вот так мы развлекали посетителей - давали роботом погонять. От первого лица!

На мальчике слева - самопальный шлем виртуальной реальности, мальчик поворачивает голову - Лупоглаз поворачивает голову. Довольно прикольно. Иногда подходили девушки в юбках и хотели присесть перед Лупоглазом, чтобы рассмотреть получше, приходилось останавливать :)
Робот номер ноль
Это было странно, по другому не описать. Со стороны это похоже на гонки черепах, наверное. Большую часть времени ничего не происходит, какая-то непонятная херовина чем-то жалко пытается шевелиться, иногда застревает, изредка смешно падает.
Но время от времени приходит участник, который умеет делать что-то руками, и тогда все получается куда более динамично.

Ехех
Нет, ну с чужим роботом и у меня было динамично и весело.
Степашка был хорош, его даже потом в музее при ЦНИИ РТК оставили, может до сих пор стоит. Манипулятор из принтерного лотка для бумаги, вся поверхность в отверстиях с шагом 10 мм, что позволяло крепить сверху что угодно (нет, зато стоило очень дорого, в лазерной резке каждый врез увеличивает стоимость :) ), на месте разворачивался, как танк. А еще ему хватало сил на то, чтобы кирпичи с места сдвигать. На первых двух соревнованиях мы с ним даже первое место заняли, а потом нам сказали сделать наконец нового робота, потому что задолбали.

Мы с ним все равно потом еще немного выступали, потому что участников было все еще мало, но призовых мест больше не было.
Поправок внесли ему две - камеру заднего вида и два импеллера.
Камера работала не постоянно, но давала клевый эффект - оператор мог, по нажатию на кнопку, переключать изображение и инвертировать управление. Т.е. если ты встрял, и развернуться уже не получалось, можно было попробовать выехать задом. Не пригодилось ни разу правда :(
С импеллерами смешная история получилась: на предыдущем фото шариков для пинг-понга - это вообще одно из самых сложных испытаний было, так вот мы задумали их раздуть и просто проехать :D
Изначальный план был дуть перед собой, но не получилось, тогда воткнули ему в зад камеру, чтобы видеть, куда едешь, пока дуешь. Разумеется первая проверка этой идеи была прямо на соревнованиях, и оказалось что ничего нормально не работает :D
Когда пропеллеры раскрутились, вибрация оказалась такой, что картинка с камеры превратилась в однородное пятно. Казалось бы ладно, нужно-то просто вперед проехать, но это оказалось тоже непросто. Держали когда-нибудь в руках джойстик от современной приставки? Знаете там стики такие, чтобы бегать? Вот чтобы дуло, нужно было жать на этот стик, а чтобы ехать - надо жать на стрелочку вверх на крестовине. И то и другое предназначено для одного левого большого пальца, мда. Мораль: проверяйте идеи перед продакшеном!
Робот номер один
Спустя время нам окончательно запретили выступать со Степашкой, и тогда пришло время делать своего робота.
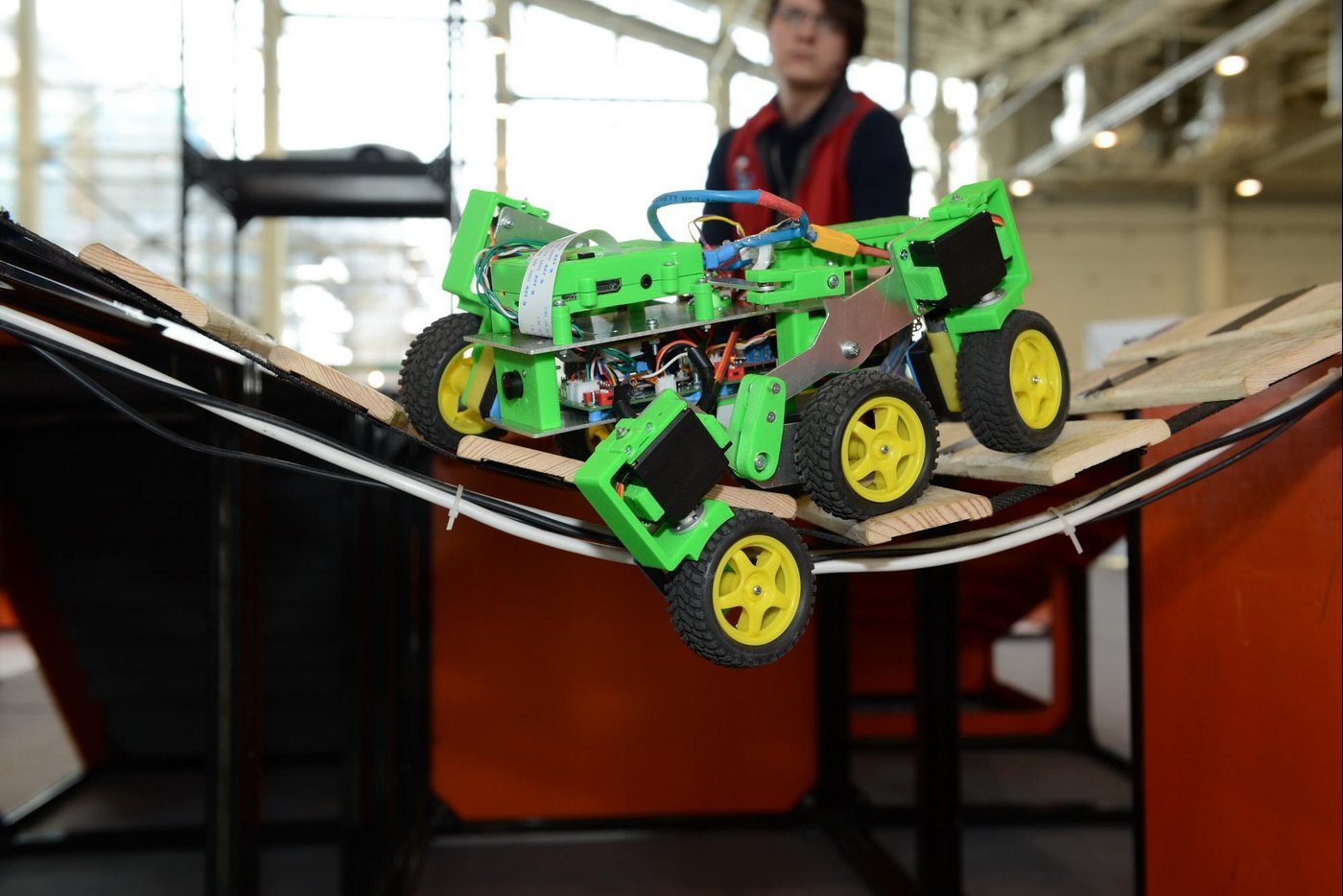
У моего руководителя (Макс, привет, вряд ли ты это читаешь) была идея фикс - сделать робота с подвеской как у марсохода. Не, ну он же должен ползать по пересеченной местности на другой планете, значит наверное должен быть проходимым, да?
Получился совсем не марсоход, ну да и я - не НАСА :)
Я не умею давать нормальные имена, поэтому...

Про него, если честно, сложно что-то рассказать. Он получился просто никакой, хотя и прикольно выглядел :)
Моторы вообще сразу были в разряде расходников, один-два менялись между попытками. Он был не очень быстрый, довольно слабый, фигово поворачивал, и при всем этом был еще и переусложненным. Не делайте так.
А еще он был слишком высоким и легко переворачивался :)
Зато у меня есть видео на котором можно посмотреть, как это примерно выглядит для того, кто управляет роботом.
На 4:40 видно как делали фотографию выше, а на 4:42 как робот перевернулся :D
С ним я уверенно занимал места где-то в начале нижней половине общего рейтинга :)
Робот номер два
Мы немного подумали, и решили сделать новую версию, поработав над ошибками.
Поэтому он вышел даже хуже, конечно же :D

Мы смогли избавиться от одной болячки первой версии - этот гораздо лучше поворачивал. А вот от остальных проблем мы не избавились: моторы все еще были слабым местом и не давали никакой проходимости, а обслуживать его, в силу конструкции, стало только сложнее. В качестве бонуса: корпус ему нарезали из более мягкой стали, которая предназначена для сгибания, поэтому в процессе езды он колебался как желейка :D
А поворачивающиеся колеса очень охотно застревали в самых неожиданных местах.
Доделывая его в вечер перед соревнованиями, я уже понимал, что это провал. Так и оказалось.
Зато я очень хорошо запомнил тот вечер. Сидел один в кабинете, уже тупо смотрел на робота, ничего не хотелось делать. Время что-то около 10 вечера, через пол часа пора выходить на поезд. Неожиданно заходит @denisdenk и говорит "Что-то ты выглядишь плохо, давай я помогу тебе взбодриться, у меня вот есть с собой молотый бразильский кофе, давай сделаю тебе". Так я в первый раз в жизни попробовал по-настоящему крепкий кофе. Офигел знатно, сердце билось так, что когда я просто сидел - я покачивался. Кажется почти не спал в ту ночь, но на утро все равно чувствовал себя бодрячком! Хороший кофе, хороший друг :)
Робот номер три
Ну уж с третьего-то раза у нас должно было что-то получиться правда?
А-ХА-ХА-ХА-ХА-ХА
Ну вообще-то почти получилось.

Вот теперь мы действительно проделали работу над ошибками. Большие колеса, нормальные моторы, даже подвеска более-менее работает.
К тому моменту в правила внесли изменения - теперь для нас было обязательно, чтобы робот умел в какую-никакую автономность. Как самый простой и очевидный вариант мы тоже решили делать следование по линии, но мы ж крутые, мы ж могем, мы ж не первый год участвуем. Короче мы решили выпендриваться и сделали распознавание линии при помощи отдельной камеры - серый конус между передними колесами - это она.
Фатальный недостаток у этой версии оказался всего один - он УЖАСНО медленный. Из 10 минут попытки, на прохождение по линии тратилось 5. Внимательнее смотрите, что заказываете с AliExpress :)
А еще история про настойчивость: деталь к которой крепились моторы исправлялась и перепечатывалась 17 (семнадцать) раз. Может это история про мою невнимательность и глупость, конечно, я не уверен, но хочу думать, что про настойчивость.
На моменте с этим роботом произошел максимальный разъеб лично меня, я не могу назвать это по другому.
Я работал над этой железякой несколько месяцев, больше трех точно, думал что уж какой-то опыт я накопил и смогу вскарабкаться обратно к призовым местам.
Обычно первая и вторая попытка проходят в разные дни, чтобы можно было успеть починить робота в случае чего. В тот раз один из давних участников не смог попасть на первый день соревнований и пришел только на второй. А потом оказалось, что он не успевал сделать ничего к обязательному условию про автономность, и воспользовался неоговоренной в правилах лазейкой. Перед своим заездом он даже обсуждал это с главным судьей соревнований примерно так:
— Ты же понимаешь, что это не твой уровень и просто лазейка?
— Понимаю, но я не успевал, а по правилам так можно
— Ладно, фиг с тобой, допущен до попытки
Если не ошибаюсь, он тогда занял второе место, а я четвертое. Снова не оказался на пъедистале, хех. Правда тогда мне дали грамоту за то, что больше других получил баллов за автономность, так что в каком-то смысле все равно получил приз :)
Я еще потом поинтересовался у него, сколько он своего робота делал. Он сказал, что меньше месяца.
Штош.
Не нужно переусложнять, получается.
Парня я не виню, конечно же, он молодец, думаю у него все круто сложилось дальше, он умный. Но в моменте обидно было прямо до слез.
И еще много роботов
Те соревнования для меня, как для участника, стали последними, больше не хотелось. Помогал коллегам своих роботов доделывать, моего Ровера потом другие доделывали, вроде с ним даже занимали призовые места, не уверен.
Но история приняла интересный оборот. Нам сказали разработать новый полигон и к нему роботов, чтобы мы предоставляли и полигон, по которому кататься, и роботов, которые бы по нему ездили. Так мы сделали робота, под которого мы же сделали полигон :D
Специально проверяли, что он может пройти все препятствия, и придумывали новые специально под него. А еще он умеет какать.

Там были какие-то мутные истории с грантами, выделением средств, как водится, непонятно на что и всякое в таком духе, я не знаю ничего об этой стороне вопроса.
Зато знаю, что пока я оттуда не уволился, мы собрали около 60 штук, а после этого - еще около 100, если не больше.

UPD
Недавно обнаружил, что, оказывается эти ребята еще и получили редизайн


Вместо заключения
Не знаю, что еще добавить, такая вот история. Теперь всем говорю, что роботов делал.




Твой пост — огнь! Получилось очень классно и вдохновляюще, на мой взгляд.
Скажи пожалуйста, сколько примерно позиций в BoM для такого робота и какова их общая стоимость?
ездил 5-6 лет назад, ещё школьником, в Белгород на соревнования
можно было участвовать на своём работе, а можно было взять погонять того самого агро-робота
организаторы подарили пару штук, мы их увезли в подмосковье
с тех пор они активно используются в кружке по робототехнике в качестве впечатляюще-крутого робота для новеньких детей)
кто знает, у скольких детей усилилось желание заниматься робототехникой после гонки на двух марсоходах, управляемых с геймпада